建設技術者向けNEWS
建設技術者の方が知りたい情報を絶賛配信中
会員登録いただくと無料で閲覧可能です!
-
エフティーエス、清水建設、戸田建設、西松建設、前田建設/吹付ロボの位置計測
ログインして続きを読む 会員でない方はこちらよりご登録ください【モーションカメラで追尾】
エフティーエス(東京都中央区、木村浩之社長)、清水建設、戸田建設、西松建設、前田建設の5社は共同で、モーションキャプチャーカメラによる吹き付けロボットの位置計測技術を開発した。吹き付けロボットのアーム位置計測にモーションキャプチャーカメラ技術を応用することで、簡便なシステムながら精度の高い計測手法を実現した。
新たに開発した吹き付けロボットは、関節数を8カ所から6カ所に減らし機械誤差の要因を少なくするとともに、構成部材の剛性を上げてたわみ量を最小限に抑えた。油圧シリンダーは、コンピューター制御にすることで、ロボットアームのより最適で微細な稼働調整を可能とし、8カ所の関節数と同等の操作性を実現した。
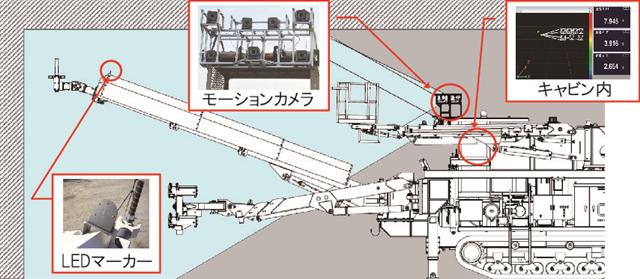 位置計測技術の全体イメージ
位置計測技術の全体イメージ関節数が少なくなったため、モーションキャプチャーカメラとマーカーー間の走査線をさえぎるものがなくなり、安定したターゲット測位検知を実現した。
マーカーーを計測するモーションキャプチャーカメラは、吹き付け機ベースマシンのキャビン屋根部に設置し、吹き付けロボットの可動空間(幅14m、高さ8m、奥行10m)内のマーカーーを、高精度に計測するために最適な台数と方位角に調整している。
また、モーションキャプチャーカメラで追尾するマーカーは、新たに自発光タイプのLEDマーカーを採用した。自発光式LEDマーカーは、トンネルの坑内照明と波長が異なり、ほかの波長の影響を受けることなく、的確に計測できる。これらにより、吹き付け空間のマーカーの位置計測精度プラスマイナス1cm以内を実現した。
さらに、計測したロボットアームの座標値をトンネル坑内の測量座標系に変換一致させることで、トンネル設計のモデル空間内の吹き付けロボットのノズル位置を、高精度に合成表現させることが可能となった。
今後、ロボットアームのデジタル制御技術を組み合わせ、遠隔または完全自動化に向けた吹き付けロボット開発を進め、広く全国に普及していく予定だ。
モーションキャプチャーカメラによる吹き付けロボット位置計測システムは、共同開発中の次世代吹き付けシステム要素技術の1つ。伸縮や回転を繰り返すロボットアームの測位は、これまで機械的なセンシングによって算出する手法が一般的だった。ただ、この手法はたわみ量のキャリブレーションに高度な技術が必要であるとともに、センシング用計器の維持管理が現場運用で課題があった。
残り50%掲載日: 2021年1月27日 | presented by 建設通信新聞